前言
图形学中最基础的东西就是坐标系统,三维的东西如何在二维中显示,这中间经历了数次坐标变换,同时坐标变换也贯穿了整个计算机图形渲染管线。
坐标篇
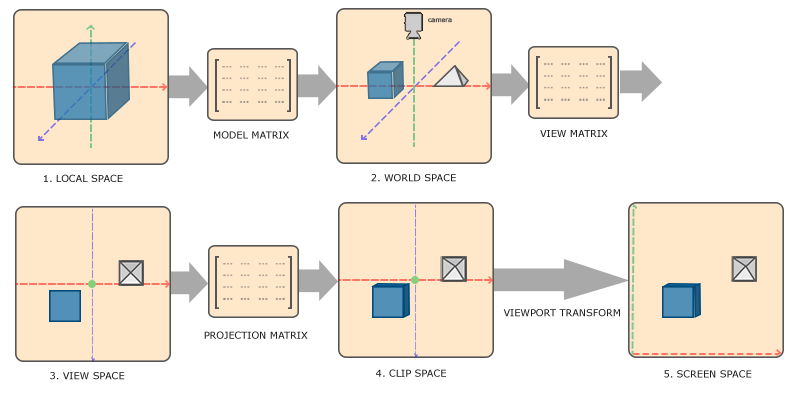
在计算机图形世界中,为更灵活的控制三维物体显示在二维中,将变换的过程大致分为 5 个空间:1、局部空间(Local Space,或者称为物体空间(Object Space));2、世界空间(World Space);3、观察空间(View Space,或者称为视觉空间(Eye Space));4、裁剪空间(Clip Space);5、屏幕空间(Screen Space)。局部空间中是物体相对于坐标原点的坐标,也是物体的固有坐标,在依次经历过缩放旋转平移,也即模型矩阵(Model Matrix)变换后,物体局部坐标变换为世界坐标,世界坐标中即定义了物体所在的位置,以及产生的旋转和缩放。在世界空间中加入相机,以相机的视角看世界中的物体,即通过观察矩阵(View Matrix,也称视图矩阵)变换后,将世界坐标转换为观察坐标,由于一张屏幕能显示的东西是有限的,而三维世界中的物体是无限,所以需要通过投影矩阵(Projection Matrix)对三维空间进行裁剪,以决定哪些物体能显示在屏幕上,为方便的计算机判断,处于裁剪空间内的坐标会被转换为 [-1, 1],为顺利在屏幕上显示,又需要通过视窗变换(Viewport Transform)将 [-1, 1] 映射为 viewport 中的图元坐标,再通过渲染管线的其他流程输出为屏幕上的像素点。
变换篇
矩阵相乘一般有左乘和右乘之分,左乘和右乘的区别在于坐标是按列还是按行排列(OpenGL 中是按列,所以是左乘,DX 中按行,所以是右乘,同一种变换,传入 DX 中的矩阵与传入 OpenGL 中的矩阵互为转置),坐标与矩阵相乘越靠近坐标的矩阵表示该坐标越先做相应矩阵变换。
模型矩阵,视图矩阵,投影矩阵,在简单的顶点着色器编程中,这三个矩阵一般会合并成一个 MVP 矩阵传入 GPU 中。
模型矩阵
模型矩阵一般定义了物体的缩放旋转平移状态,缩放矩阵的构造很简单,若物体在 \((x,y,z)\) 方向上缩放尺度分别为 \((S_x, S_y, S_z)\),则缩放矩阵为: \[ M_{scaling} = \begin{bmatrix} S_x & 0 & 0 & 0 \\ 0 & S_y & 0 & 0 \\ 0 & 0 & S_z & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix} \] 旋转矩阵就非常麻烦了,这里暂且不讨论其如何计算,只给出矩阵,物体绕任意轴 \((R_X, R_y, R_z)\) 旋转 θ 角的矩阵为: \[ M_{rotation} = \begin{bmatrix} cos\theta+R_x^2(1-cos\theta) & R_xR_y(1-cos\theta)-R_zsin\theta & R_xR_z(1-cos\theta)+R_ysin\theta & 0 \\ R_yR_x(1-cos\theta)+R_zsin\theta & cos\theta+R_y^2(1-cos\theta) & R_yR_z(1-cos\theta)-R_xsin\theta & 0 \\ R_zR_x(1-cos\theta)-R_ysin\theta & R_zR_y(1-cos\theta)+R_xsin\theta & cos\theta+R_z^2(1-cos\theta) & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix} \] 当然,由于万向节锁的存在,一般不会直接使用欧拉角和旋转轴计算旋转矩阵,而是会通过四元数得到旋转矩阵,这样既高效又能避免万向节锁,详情可看「LearnOpenGL」译者的教程。
至于平移矩阵也非常简单,若物体在 \((x,y,z)\) 方向上平移量分别为 \((T_x, T_y, T_z)\),则平移矩阵为: \[ M_{translation} = \begin{bmatrix} 1 & 0 & 0 & T_x \\ 0 & 1 & 0 & T_y \\ 0 & 0 & 1 & T_z \\ 0 & 0 & 0 & 1 \end{bmatrix} \] 前面的缩放和旋转矩阵其实只需要用到 3×3 的矩阵,而之所以用 4×4 的表示也是因为平移矩阵,普通的 3 维坐标必须增加一维 \(w\) 构成齐次坐标才能进行平移操作,\(w\) 一般都是 1.0,而从齐次坐标\((x,y,z,w)\) 变为普通的 3 维坐标需要每个分量除以 \(w\),即 \((x/w, y/w, z/w)\) 。
则模型矩阵 \(M_{model} = M_{translation} \cdot M_{rotation} \cdot M_{scaling}\)。
视图矩阵
视图矩阵描述的是三维场景中模拟相机的状态,根据模拟相机的状态确定一套以相机为原点的相机坐标系,从而使用视图矩阵进行坐标变换,至于为啥是模拟相机,是因为 OpenGL 本身并没有相机的概念,通过模拟相机来实现在三维场景中的漫游。
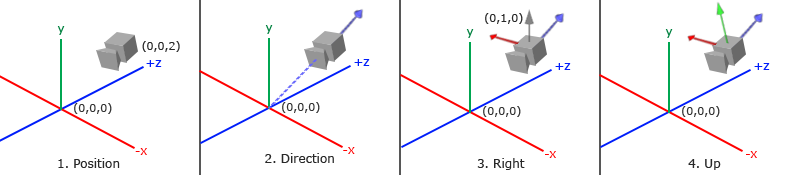
模拟相机有三个关键点,分别为相机位置(cameraPos),相机朝向点(cameraTarget),相机上向量(top),根据相机位置和相机朝向点可确定相机坐标系的 z 轴正向向量 \(cameraDirection = (cameraPos - cameraTarget).normalize\),叉乘相机上向量和相机 z 轴正向向量可得到相机坐标系 x 轴正向向量 \(cameraRight = top.cross(cameraDirection).normalize\),最后将相机 z 轴正向向量与 x 轴正向向量叉乘得到 y 轴正向向量 \(cameraUp = cameraDirection.cross(cameraRight)\),如此即可建立完整的相机坐标系,从而得到变换矩阵,即视图矩阵: \[ M_{view} = \begin{bmatrix} R_x & R_y & R_z & 0 \\ U_x & U_y & U_z & 0 \\ D_x & D_y & D_z & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} 1 & 0 & 0 & -P_x \\ 0 & 1 & 0 & -P_y \\ 0 & 0 & 1 & -P_z \\ 0 & 0 & 0 & 1 \end{bmatrix} \] 其中 \(R\) 是相机 x 轴正向向量,\(U\) 是相机 y 轴正向向量,\(D\) 是相机 z 轴正向向量, \(P\) 是相机位置向量。
投影矩阵
投影矩阵描述的是摄像机前的可视区域(Frustum),根据可视区域的形状可分为正射投影(Orthographic Projection)和透视投影(Perspective Projection)。
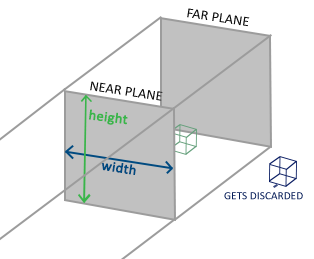
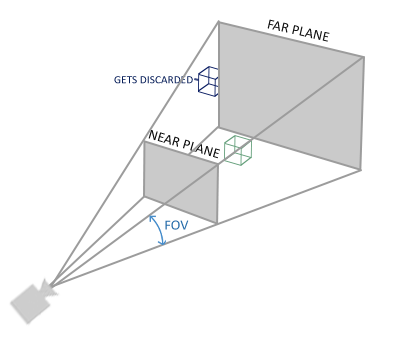
对于这两种投影,都有远(far)近(near)参数,不同的是,正射投影是个立方体,所以有左(left)右(right)上(top)下(bottom)四个参数,而透视投影是个类梯形台,所以还有垂直方向视野(Field of View,fov),以及一个宽高比(aspect)两个参数。远近两个参数决定摄像机能看到多近和多远的物体,太近和太远都会看不见,一般可设 near = 0.1,far = 1000;若渲染视窗(viewport)宽为 W,高为 H,则一般 \(left=-W/2, right=W/2, top=H/2, bottom=-H/2\) ;透视投影的 fov 是角度,一般设为 45.0,而 \(aspect = W/H\) 。这两种投影的矩阵分别为: \[ M_{orth} = \begin{bmatrix} \frac{2}{right-left} & 0 & 0 & -\frac{right+left}{right-left} \\ 0 & \frac{2}{top-bottom} & 0 & -\frac{top+bottom}{top-bottom} \\ 0 & 0 & \frac{-2}{far-near} & -\frac{far+near}{far-near} \\ 0 & 0 & 0 & 1 \end{bmatrix} \\ M_{pers} = \begin{bmatrix} \frac{2near}{right-left} & 0 & \frac{right+left}{right-left} & 0 \\ 0 & \frac{2near}{top-bottom} & \frac{top+bottom}{top-bottom} & 0 \\ 0 & 0 & \frac{-(far+near)}{far-near} & \frac{-2far*near}{far-near} \\ 0 & 0 & -1 & 0 \end{bmatrix} \]
在 three.js 中,对于透视投影矩阵中 left, right, top, bottom 计算方式为:
1 | let top = near * Math.tan( _Math.DEG2RAD * 0.5 * this.fov ) / this.zoom; |
对于透视投影,由于计算出的齐次坐标 w 分量显然不为 1.0,所以必须进行透视除法(x,y,z 各分量分别除以 w),得到真正的 3 维坐标。
正射投影一般用来模拟 2D 空间,透视投影用来模拟 3D 空间,当透视投影 near 和 far 设置的相差太大时,很容易引发 z-fighting 现象,原因是离近平面越远时,计算出的深度精度越低,three.js 中为解决这一问题,引入了一个 logarithmicDepthBuffer 参数来决定是否开启使用对数函数优化深度计算,具体可看源码中的 logdepthbuf_vertex.glsl.js 和 logdepthbuf_fragment.glsl.js 文件,开启该参数会造成渲染性能下降。
小结
\(M_{mvp} = M_{projection}M_{view}M_{model}\),一个局部坐标 \(V_{local}\) 在经过 MVP 矩阵变换之后可得到裁剪坐标 \(V_{clip} = M_{mvp}V_{local}\) ,在 OpenGL 中,\(V_{clip}\) 会被赋值到顶点着色器中的 gl_Position,并且 OpenGL 会自动进行透视除法和裁剪。
3 维中的相机一般可分为两种,第一人称相机(常规 FPS 游戏)和第三人称相机(常规 ARPG 游戏),第一人称相机的特点是灵活,相机往往可以任意改变位置和朝向,所以会对某些人造成一种 “晕 3D” 的现象,而第三人称相机虽然可以改变相机朝向点和位置,但当朝向点和到朝向点的距离一旦固定,则相机只能沿着以朝向点为球心,以到朝向点的距离为半径的球面上运动,这两种相机一般看具体业务需求进行选择。
缩放操作是很常规的一种操作,镜头拉近代表放大,拉远代表缩小。在使用透视投影的 3 维场景中,只需要改变相机到朝向点的距离即可简单实现缩放操作,而在使用正射投影的场景中,改变距离并不能实现缩放,而是需要改变 左右上下 四个参数,所以在相机中往往会在引入一个 zoom 的参数,用 左右上下 四个参数分别除以 zoom 得到真正的 左右上下,从而改变 zoom,就可以改变相机参数,进而实现正射投影的缩放。
管线篇
渲染管线,图形学中最重要的概念之一,既然称之为管线,自然有像流水线一样的步骤,各个步骤具体做的事情如下:
- 顶点着色器:负责将顶点数据进行坐标变换,该着色器中一般存在 MVP 矩阵,负责将三维坐标变换为二维坐标,该阶段也可以优化每个点的深度值,以便管线后续进行深度测试,也可以利用光照简单优化每个顶点的颜色;
- 图元装配:将输入的顶点数据进行组装,形成图元,常见的图元包括:点(GL_POINTS)、线(GL_LINES)、线条(GL_LINE_STRIP)、三角面(GL_TRIANGLES),在该过程中,一般 GPU 会做一些裁剪和背面剔除等操作,以减少图元的数量,同时完成透视除法以进行屏幕映射;
- 光栅化:负责计算每个图元到屏幕像素点的映射。光栅化会计算每个图元所覆盖的片元,同时利用顶点属性插值计算每个片元的属性,片元可认为是候选像素,经过后续管线阶段即可变为真正的像素。
- 片元着色器:将光栅化得到的片元进行颜色计算。图形学中几乎所有的高级特效都会在这一步完成,光照计算,阴影处理,纹理,材质,统统在这一步进行处理;
- 归属测试:即测试片元所在位置是否位于当前上下文视窗内,若一个显示帧缓冲区视窗被另一个视窗所遮蔽,则剔除该部分片元。
- 模板测试:即测试片元是否满足一定条件(可大于或小于某个值等),若测试不满足,则剔除该该片元, OpenGL 可自行选择开启或关闭模板测试。
- 深度测试:用来测试片元的远近,远的片元被遮挡。在深度测试,若两片元深度值接近,则可能会引起 Z-fighting 现象,即像素闪烁,这是因为此时 GPU 无法确定该剔除哪个片元,导致这一帧可能绘制这个片元,下一帧绘制另一个片元。若开启 Alpha 测试,即启用透明度,则会在下一阶段进行 Alpha 混合,从而达到透明效果。
- 混合:将新生成的片元颜色和帧缓冲区中对应位置的颜色进行混合,得到像素颜色。
- 抖动:一种以牺牲分辨率为代价来增加颜色表示范围技术,从视觉效果上来看就是颜色过度更平滑。
以上这些阶段中,能完全被编程控制的也就顶点着色器和片元着色器两个阶段,其余阶段要么完全无法控制,要么只能通过已有的参数进行设置,当然也可以通过顶点着色器和片元着色器影响余下阶段,顶点着色器和片元着色器也统称 Shader 编程。
有时候为了做更好看的特效,需要进行多次渲染,将上一次渲染的结果作为下一次渲染的输入,此时可以将颜色缓冲区作为一张纹理,并构造新的帧缓冲区,将该纹理作为输入,重新放进渲染管线中,这种操作方式也叫后期处理(Post Processing),虽然好看,但对 GPU 的负载很大,需要合理使用。
对于渲染管线,Shaun 的理解也就到此为止了,非常粗浅,Shader 也只是刚入门的水平,Shaun 在图形学方面做的更多是降低 Draw-Call 和 CPU 层面的 Tessellation,以及 Geometry 上的事,对纹理材质颜色光照阴影等方面涉及的较少。
后记
虽然目前 OpenGL 已停止更新,但学习图形学编程,OpenGL 总是绕不过去(至少暂时以及未来很长一段时间都会是这样),而且图形学基础知识本质都是相同的,不管是 DirectX 还是 Vulkan,变的只是写法形式而已,数学知识总是在那里,两种 shader 也同样需要,所以了解这些东西还是有必要的。
附录
二维图像的图像透视投影变换
图像的透视投影变换常用于图像的矫正,OpenCV 中就有现成的 api(getPerspectiveTransform 和 warpPerspective),用于将不规整的四边形区域变换为规整的矩形区域。其基本的数学原理为,先构造一个投影变换等式: \[ \begin{bmatrix} XW \\ YW \\ W \end{bmatrix} = \begin{bmatrix} a & b & c \\ d & e & f \\ g & h & 1 \end{bmatrix} \begin{bmatrix} x \\ y \\ 1 \end{bmatrix} \] 设四边形中四个点分别为 \((X_1, Y_1),(X_2, Y_2),(X_3, Y_3),(X_4, Y_4)\) ,对应矩形中四个点为 \((x_1, y_1),(x_2, y_2),(x_3, y_3),(x_4, y_4)\)。则可构造齐次线性方程组: \[ \begin{bmatrix} x_1 & y_1 & 1 & 0 & 0 & 0 & -X_1x_1 & -X_1y_1 \\ 0 & 0 & 0 & x_1 & y_1 & 1 & -Y_1x_1 & -Y_1y_1 \\ x_2 & y_2 & 1 & 0 & 0 & 0 & -X_2x_2 & -X_2y_2 \\ 0 & 0 & 0 & x_2 & y_2 & 1 & -Y_2x_2 & -Y_2y_2 \\ \vdots & \vdots & \vdots & \vdots & \vdots & \vdots & \vdots & \vdots \\ x_n & y_n & 1 & 0 & 0 & 0 & -X_nx_n & -X_ny_n \\ 0 & 0 & 0 & x_n & y_n & 1 & -Y_nx_n & -Y_ny_n \end{bmatrix} \begin{bmatrix} a \\ b \\ c \\ d \\ e \\ f \\ g \\ h \end{bmatrix} = \begin{bmatrix} X_1 \\ Y_1 \\ X_2 \\ Y_2 \\ \vdots \\ X_n \\ Y_n \end{bmatrix} \] 解这个方程组得到 abcdefg ,使用上面的投影变换等式可计算 \(X = XW / W, Y = YW / W\) ,从而使用插值得到规整矩形图形的各个像素值。
Shader 学习资料
shader 入门书:https://thebookofshaders.com,在线编写 shader :https://thebookofshaders.com/edit.php
glslsandbox 网站:http://glslsandbox.com/
shadertoy 网站:https://www.shadertoy.com/
threejs shader 系列教程:https://www.cnblogs.com/heymar/category/2432299.html
参考资料
[1] 坐标系统(https://learnopengl-cn.github.io)